





行星减速机是如何搭配伺服电机的?
 时间: 2024-04-21 12:10:10
时间: 2024-04-21 12:10:10  作者:
作者: 行星减速机是一种用途广泛的工业产品,该减速机体积小、重量轻,承载能力高,常规使用的寿命长、运转平稳,噪声低。具有功率分流、多齿啮合独用的特性。最大输入功率可达104kW。适用于起重运输、工程机械、冶金、矿山、石油化学工业、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器和航空航天等工业部门行星系列新品种WGN定轴传动减速器、WN子母齿轮传动减速器、弹性均载少齿差减速器。
行星减速机是一种具有广泛通用性的新性减速机,内部齿轮采用20CvMnT渗碳淬火和磨齿。整机具有结构尺寸小,输出扭矩大,速比在、效率高、性能安全可靠等特点。
相关概念级数:行星齿轮的套数.由于一套星星齿轮不足以满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降.
回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是分,就是一度的六十分之一,也有人称之为背隙。行星减速机结构
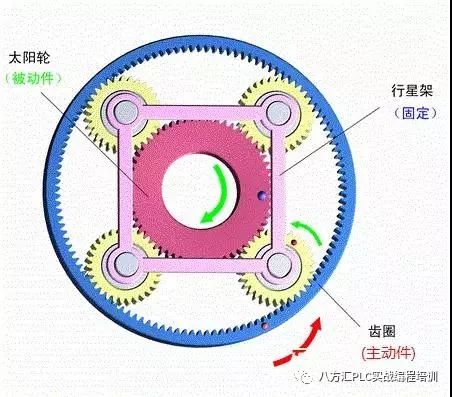
行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速.下面是几款行星减速机的结构图!


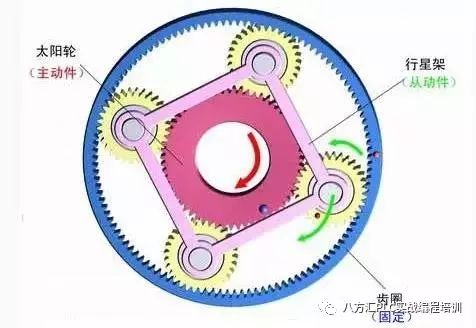
1)齿圈固定,太阳轮主动,行星架被动。从图例1中能够准确的看出,此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
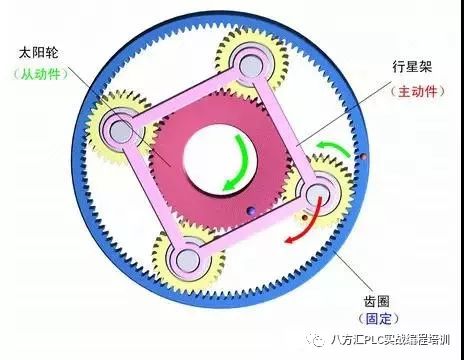
2)齿圈固定,行星架主动,太阳轮被动。从图例2中能够准确的看出,此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
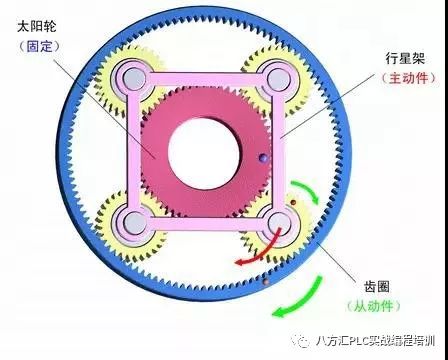
3)太阳轮固定,齿圈主动,行星架被动。从图例3中能够准确的看出,此种组合为降速传动,传动比一般为1.25~1.67,转向相同。

从演示中能够准确的看出,此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
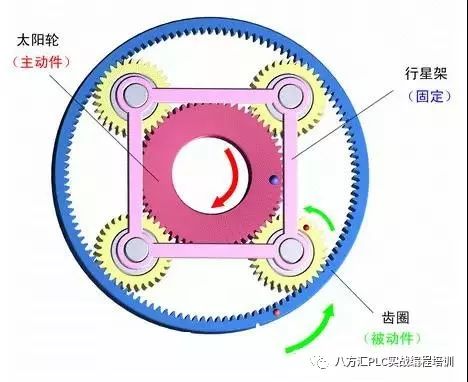
5)行星架固定,太阳轮主动,齿圈被动。从演示中能够准确的看出此种组合为降速传动,传动比一般为1.5~4,转向相反。
从演示中能够准确的看出此种组合为升速传动,传动比一般为0.25~0.67, 转向相反。
当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。该组合行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。第六种组合方式, 由于升速较大,主被动件的转向相反,在汽车上通常不用这种组合。
现代工业设施应用中在高精度应用场合随着伺服电机技术的发展,从高扭矩密度乃至于高功率密度,使转速的提升高过3000rpm,由于转速的提升,使得伺服电机的功率密度大幅度的提高。这意谓着伺服电机要不要搭配减速机,其决定因素主要是从应用的需求上及成本的考虑来审视。例如,以下应用场合必须搭配伺服行星减速机。
1、重负荷高精度必须对负载做移动并要求精密定位时便有此需要。一般像是航空、卫星、医疗、军事科技、晶圆设备、机器人等自动化设备。他们的共同特征是将负载移动所需的扭矩往往远超过伺服电机本身的扭矩容量。而透过减速机来做伺服电机输出扭矩的提升,便可有效解决这一个问题。
2、提升扭矩输出扭矩提升的方式,可能采用直接增大伺服电机的输出扭矩方式,但这样的形式不但一定要使用昂贵大功率的伺服电机,电机还要有更强壮的结构,扭矩的增大正比于控制电流的增大,此时采取了比较大的驱动器,功率电子组件和相关机电设施规格的增大,又会使控制管理系统的成本大幅增加。
3、提高使用性能据了解,负载惯量的不当匹配,是伺服控制不稳定的最大原因之一。对于大的负载惯量,可通过减速比的平方反比来调配最佳的等效负载惯量,以获得最佳的控制响应。所以从这个方面来看,行星减速机为伺服应用的控制响应的最佳匹配。4、降低设备成本从成本观点,假设0.4KW的AC伺服电机搭配驱动器,需耗费一单位设备成本,以5KW的AC伺服电机搭配伺服驱动器必须耗费15单位成本,但是若采用0.4KW伺服电机与驱动器,搭配一组减速机就能达到前述耗费15个单位成本才能完成的事,在操作成本上节省50%以上。
因此,使用者可依其加工需求不同,决定选用不同安装形式的行星减速机产品。一般而言,在机台运转上有低速、高扭矩、高功率密度场合需求,绝大部分采用行星减速机。
近期,2017世界 机器人 大会在北京亦创国际会展中心完美落幕,ABB、 发那科 、KUKA、 安川 、新松、哈工大机器人、广州数控、康力优蓝、优必选等国内外有名的公司同台竞技。手术机器人、钢琴机器人、智能协作机器人、仿生水母、仿生手臂等让观众目不暇接。机器人的正常工作离不开 伺服电机 ,机器人电动伺服驱动系统是利用各种电机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行机构,通常由伺服电机以及伺服驱动器组成。工业升级让中国机器人电机厂商面临着机会和挑战,与欧美日先进厂商相比我们还有着差距,与非网小编将汇总盘点全世界主要的机器人伺服电机厂商,让我们一起看看机器人伺服电机行业的发展现状。 伺服电机概念
瑞萨电子发布RZ/T2M电机控制MPU,实现对伺服电机快速、高精度控制 在单芯片上结合电机控制功能与符合TSN标准的工业以太网网络, 同时支持功能安全 2022 年 6 月 7 日,中国北京讯 - 全球半导体解决方案供应商瑞萨电子(TSE:6723)今日宣布,推出瑞萨高性能的RZ/T2M电机控制微处理器单元(MPU),应用于交流伺服驱动器和工业机器人等领域。RZ/T2M在单芯片上结合了快速、高精度的实时电机控制能力及对最新的工业以太网协议的支持,同时实现功能安全操作。通过为电机控制提供所有必要的外设功能,RZ/T2M能够为用户显著减少外部元件数量,从而缩减BOM成本和产品尺寸。 瑞萨电子工业自动化事业部副总裁坪
快速、高精度控制 /
1、高速旋转时发生 电机 偏差计数器溢出错误。 对策:检查电机动力电缆和 编码器 电缆的配线是不是正确,电缆是否有破损。 输入较长指令脉冲时发生电机偏差计数器溢出错误。 对策:增益设置太大,重新手动调整增益或使用自动调整增益功能;延长加减速时间;负载过重,要重新选定更大容量的电机或减轻负载,加装减速机等传动机构提高负荷能力。 2、运行过程中发生电机偏差计数器溢出错误。 对策:增大偏差计数器溢出水平设定值;减慢旋转速度;延长加减速时间;负载过重,要重新选定更大容量的电机或减轻负载,加装减速机等传动机构提高负载能力。 3、伺服电机在有脉冲输出时不运转,怎么样处理? a、监视控制器的脉冲输出当前值以及脉冲输出灯是否闪烁,确认指令
一,螺旋压力机简介: 螺旋压力机是指通过一组以上的外螺栓与内螺栓在框架内旋转产生压力形式的压力机械的总称。按结构分为两种:一种是向螺栓上施加扭矩而产生静压的方式,又称螺旋压力机;一种是通过螺栓上固定飞轮的旋转产生能量,能量集中释放一次产生一次压力的方式,又称摩擦压力机。螺旋压力机按发展历史分别是:人力驱动螺旋压力机、摩擦压力机、开关磁阻电机驱动螺旋压力机、伺服驱动螺旋压力机。 螺旋压力机在各种高、中、低档耐火材料的成型产品加工;各种金属材料产品的冷锻、热锻、铸造等加工行业有广泛的应用。 本文所介绍的伺服驱动螺旋压力机是通过伺服驱动螺栓结构旋转使滑块上下位移产生压力,是螺旋压力机的一种,是摩擦压力机及开关磁阻压力机的升级
工业控制已从单机控制走向集中监控、集散控制,如今已进入网络时代,工业控制器连网也为网络管理提供了方便。Modbus就是工业控制器的网络协议中的一种,通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其它设备之间可以通信。基于上述原理,文中设计了一套 伺服电机 联动 控制管理系统 ,采用Modbus RTU通信协议进行数据通信,达到能够同时对2台电机联动控制的目的。 1 系统构成以及原理 在工业控制过程中,电机是 控制管理系统 一个重要组成部分。一般是通过微处理器控制电机继而达到实现自动控制的目的。而上位机通过串行或者并行通信协议控制微处理器,来实现远程控制。具体框图如图1所示。 文中提出了一种新的 伺服电机
任何 伺服电机 都可以改成双向变速电机。通常来说控制电机的速度和方向是需要一个电机驱动芯片以及其他一些元件的,而伺服电机上这些元件已经都具备了。改装伺服电机是最常见且最廉价的,获取机器人里用的数字控制变速器的方法,这样就得到一个连续转动的伺服电机。这个改动,部分是机械的,部分是电气的。电气的改动部分是将电位器改成两个同阻值的固定电阻,机械的改动部分是将阻止电机全方位转动的限位装置去掉。 首先拆开伺服电机。HTX500伺服电机壳由三块塑料卡接而成,我们大家可以用小的一字螺丝刀或者类似的薄片将其撬开。从顶上将齿轮拉开,然后从底下小心地将伺服电机的控制电路板拉出来(见图I)。里面的机械限位有两个,用尖嘴钳弯折可以将转动轴旁边的金
改成连续转动 /
增量式 编码器 的输出信号为方波信号,又可大致分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备ABZ输出信号外,还具备互差120度的电子换相信号UVW,UVW各自的每转周期数与电机转子的磁极对数一致。带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下: 1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置; 2.用示波器观察编码器的U相信号和Z信号; 3.调整编码器转轴与电机轴的相对位置; 4.一边调整,一边观察编码器U
伺服驱动器是现代运动控制的重要组成部分,被大范围的应用于工业机器人及数控加工中心等自动化设备中。尤其是应用于控制交流永磁同步电机的伺服驱动器慢慢的变成了国内外研究热点。 一、伺服电机驱动器简介 伺服电机驱动器用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要使用在于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机来控制,实现高精度的传动系统定位,产品实物图如下图1所示。 图 1 伺服电机驱动应用原理图 二、伺服电机驱动器原理简介 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,能轻松实现很复杂的控制算法,实现数字化、网络化和智能化。功率器件普遍
驱动器的应用 /
及其控制 (寇宝泉,程树康编著)
嵌入式工程师AI挑战营(初阶):基于RV1106,动手部署手写数字识别落地
有奖直播 瑞萨新一代视觉 AI MPU 处理器 RZ/V2H:高算力、低功耗、实时控制
消息称三星电子在硅谷开设先进处理器实验室,聚焦 RISC-V IP 开发
4 月 19 日消息,据韩媒 Sedaily 报道,三星电子通过旗下三星综合研究院(SAIT,Samsung Advanced Institute of Technology)在美 ...
一、定义与作用视频拼接控制器也称视频处理器,在液晶拼接屏中起了重要的作用,它是大屏拼接系统中的核心设备,但正如主机需要CPU一样,液晶 ...
100W音频功率放大器由运算功率放大器集成电路LM12CLK供电。该单片IC可以向 4Ω 负载提供 80W 正弦波功率,失线%。功率带宽为 ...
构建放大器简单,使用标准且稳定可靠。这里介绍的 75 W 放大器电路能够驱动 4 欧姆,但是,尽管用于 4 欧姆,该放大器的误差非常小 ...
这是一款8Ω负载下的12W小型功率放大器,将NE5534集成技术与晶体管作为V-MOSFET输出级相结合,获得出色的音质。输入灵敏度最大为 3Vrms,1 ...

PLC的输入端,输出端常见的接线月份营收环比减少,中小尺寸面板出货同减
【已结束】有奖直播【TI 全新CC2340无线 MCU,助力低功耗蓝牙应用】
你敢评,我敢送! 点评《越控越有趣-TI C2000 LaunchPad炼成记》尽享精彩好礼!
温故知新:回顾 ST 2017 Roadshow,洞悉电子界技术新潮流!
有奖直播:AC/DC 在 ATX 及 Server 电源解決方案及应用 报名开始啦!
嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科词云: